

UniLGL: Learning Uniform Place Recognition for FOV-limited/Panoramic LiDAR Global Localization
arXiv:2507.12194v3 Announce Type: replace Abstract: Existing LGL methods typically consider only partial information (e.g., geometric features) from LiDAR observations or are designed for homogeneous LiDAR sensors, overlooking the uniformity in LGL. In this work, a uniform LGL method is proposed, termed UniLGL, which simultaneously achieves spatial and material uniformity, as well as sensor-type uniformity. The key idea of the proposed method is to encode the complete point cloud, which contains both geometric and material information, into a pair of BEV images (i.e., a spatial BEV image and an intensity BEV image). An end-to-end multi-BEV fusion network is designed to extract uniform features, equipping UniLGL with spatial and material uniformity. To ensure robust LGL across heterogeneous
View PDF
Abstract:Existing LGL methods typically consider only partial information (e.g., geometric features) from LiDAR observations or are designed for homogeneous LiDAR sensors, overlooking the uniformity in LGL. In this work, a uniform LGL method is proposed, termed UniLGL, which simultaneously achieves spatial and material uniformity, as well as sensor-type uniformity. The key idea of the proposed method is to encode the complete point cloud, which contains both geometric and material information, into a pair of BEV images (i.e., a spatial BEV image and an intensity BEV image). An end-to-end multi-BEV fusion network is designed to extract uniform features, equipping UniLGL with spatial and material uniformity. To ensure robust LGL across heterogeneous LiDAR sensors, a viewpoint invariance hypothesis is introduced, which replaces the conventional translation equivariance assumption commonly used in existing LPR networks and supervises UniLGL to achieve sensor-type uniformity in both global descriptors and local feature representations. Finally, based on the mapping between local features on the 2D BEV image and the point cloud, a robust global pose estimator is derived that determines the global minimum of the global pose on SE(3) without requiring additional registration. To validate the effectiveness of the proposed uniform LGL, extensive benchmarks are conducted in real-world environments, and the results show that the proposed UniLGL is demonstratively competitive compared to other State-of-the-Art LGL methods. Furthermore, UniLGL has been deployed on diverse platforms, including full-size trucks and agile Micro Aerial Vehicles (MAVs), to enable high-precision localization and mapping as well as multi-MAV collaborative exploration in port and forest environments, demonstrating the applicability of UniLGL in industrial and field scenarios.
Subjects:
Robotics (cs.RO)
Cite as: arXiv:2507.12194 [cs.RO]
(or arXiv:2507.12194v3 [cs.RO] for this version)
https://doi.org/10.48550/arXiv.2507.12194
arXiv-issued DOI via DataCite
Journal reference: IEEE TRANSACTIONS ON ROBOTICS, 2026
Related DOI:
https://doi.org/10.1109/TRO.2026.3672514
DOI(s) linking to related resources
Submission history
From: Hongming Shen [view email] [v1] Wed, 16 Jul 2025 12:45:56 UTC (46,970 KB) [v2] Thu, 31 Jul 2025 11:57:29 UTC (32,878 KB) [v3] Tue, 31 Mar 2026 13:00:31 UTC (17,540 KB)
Sign in to highlight and annotate this article
Conversation starters
Daily AI Digest
Get the top 5 AI stories delivered to your inbox every morning.
More about
benchmarkannounceplatform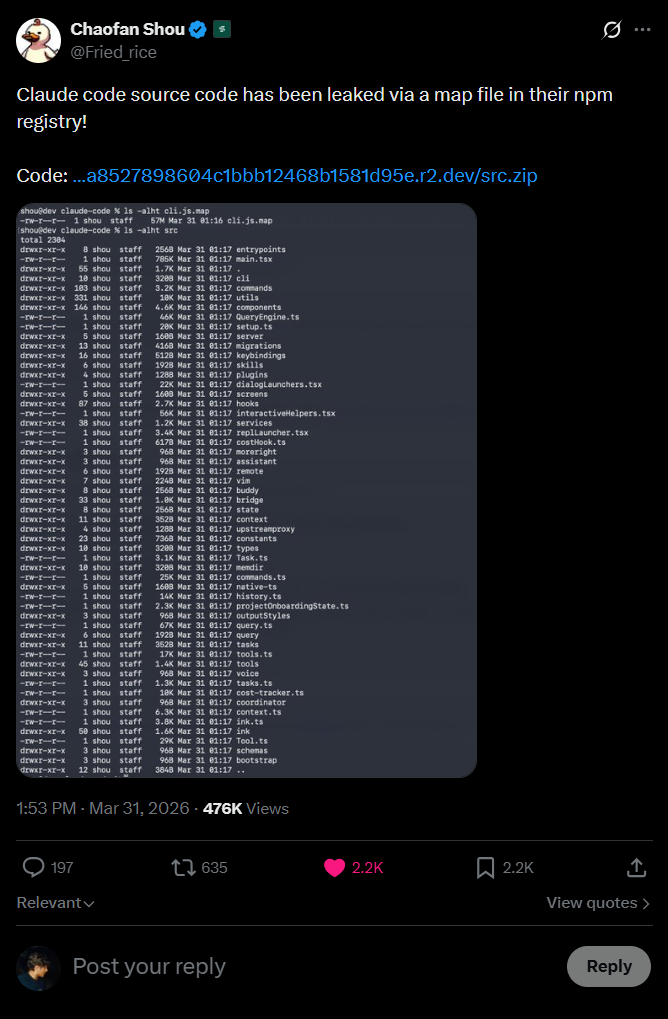
I Read Every Line of Anthropic’s Leaked Source Code So You Don’t Have To. Here’s What They Were Hiding.
Last Updated on April 2, 2026 by Editorial Team Author(s): DrSwarnenduAI Originally published on Towards AI. 512,000 lines of TypeScript. A secret AI pet. An always-on daemon that dreams. A mode that hides from you that it’s AI. All of it now public, because someone forgot one line in a config file. March 31, 2026. 4:23 AM Eastern Time. Image related to the code leak incidentThe article discusses the significant leakage of Anthropic s Claude Code, detailing how a single error led to the exposure of over 512,000 lines of proprietary code. It uncovers the complexities of the software, including unique features like a companion pet and a proactive assistant. The incident highlights deeper implications, including security vulnerabilities and potential misuse of technology, alongside ongoing di
15 Tips to Use Claude Code More Effectively from Boris Cherny (Creator of Claude Code)
Author(s): Youssef Hosni Originally published on Towards AI. 15 Tips to Use Claude Code More Effectively from Boris Cherny (Creator of Claude Code) Most developers use Claude Code for simple tasks, but it can do much more than that. Once you start exploring its advanced features, it becomes a powerful tool for automating workflows, managing codebases, and speeding up daily work. I came across these tips from Boris Cherny (creator of Claude Code), and they completely change how you can use it. In this blog, I summarized them and how to use each, and provided resources for more information.The article outlines 15 tips for maximizing the use of Claude Code, emphasizing features like its mobile app, session mobility across devices, the powerful scheduling features with /loop and /schedule comm

Knowledge Map
Connected Articles — Knowledge Graph
This article is connected to other articles through shared AI topics and tags.
More in Products


AI Scraping
Last Updated on April 2, 2026 by Editorial Team Author(s): Sefa Bilicier Originally published on Towards AI. Disclaimer: This article is only for educational purposes. We do not encourage anyone to scrape websites, especially those web properties that may have terms and conditions against such actions. Introduction The internet contains an enormous wealth of information, from product prices and news articles to social media posts and research data. But how do we efficiently extract and utilize this data? The answer lies in web scraping, and more recently, its evolved form: AI scraping. Then, firstly let our eyes be on the web scraping! Web Scraping Web scraping is the automated process of extracting specific data from web pages based on defined parameters. Instead of manually copying infor
15 Tips to Use Claude Code More Effectively from Boris Cherny (Creator of Claude Code)
Author(s): Youssef Hosni Originally published on Towards AI. 15 Tips to Use Claude Code More Effectively from Boris Cherny (Creator of Claude Code) Most developers use Claude Code for simple tasks, but it can do much more than that. Once you start exploring its advanced features, it becomes a powerful tool for automating workflows, managing codebases, and speeding up daily work. I came across these tips from Boris Cherny (creator of Claude Code), and they completely change how you can use it. In this blog, I summarized them and how to use each, and provided resources for more information.The article outlines 15 tips for maximizing the use of Claude Code, emphasizing features like its mobile app, session mobility across devices, the powerful scheduling features with /loop and /schedule comm
I Read Every Line of Anthropic’s Leaked Source Code So You Don’t Have To. Here’s What They Were Hiding.
Last Updated on April 2, 2026 by Editorial Team Author(s): DrSwarnenduAI Originally published on Towards AI. 512,000 lines of TypeScript. A secret AI pet. An always-on daemon that dreams. A mode that hides from you that it’s AI. All of it now public, because someone forgot one line in a config file. March 31, 2026. 4:23 AM Eastern Time. Image related to the code leak incidentThe article discusses the significant leakage of Anthropic s Claude Code, detailing how a single error led to the exposure of over 512,000 lines of proprietary code. It uncovers the complexities of the software, including unique features like a companion pet and a proactive assistant. The incident highlights deeper implications, including security vulnerabilities and potential misuse of technology, alongside ongoing di
Discussion
Sign in to join the discussion
No comments yet — be the first to share your thoughts!